随着半导体、液晶制造设备为代表的高清洁度需求,以及HDD的记录密度的提升,对清洁设备的需求也在扩大,无尘室内置的搬送手臂的需求也急剧升高。在这些搬送手臂中所使用的机构是,由以矢量机器人为代表的回转机构、直交机器人中的直动机构、亦或这些组合机构所构成。
回转机构在作为发生源的驱动、支持部分容易通过油封等方法进行密封,因此有高清洁度的优点。但是从节省空间的观点来看,直动机构有利的情况较多,特别是在用于升降动作的升降台中使用了直动机构。(无尘室的单位面积成本非常高,因此节省空间化与清洁化同样重要。)
这里针对通过直动机构驱动装置来实现清洁搬运手臂的的现状与展望进行介绍。
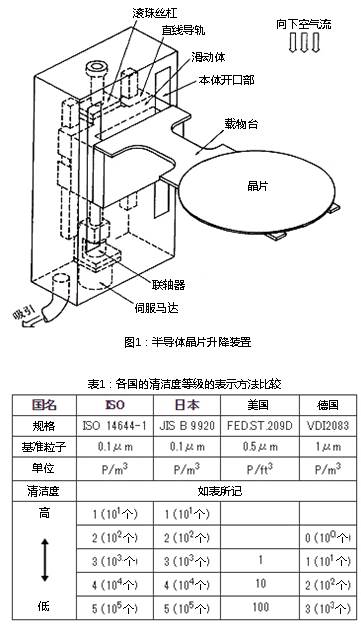
图1是半导体晶片用升降部分的示意图,曝光、形成薄膜等晶片制造工程中晶片暗盒与处理装置之间搬运晶片所用的装置。此用途所必要的特点如下所示。
(1) 低发尘
花工夫在晶片面上产生低流动来创造清洁环境,但是由于周边物件扰乱空气,使得升降台的一部分发尘到达晶片的表面。升降台的发尘要求ISO等级2~3*)。
液晶相关设备的情况下要求ISO等级4~5。
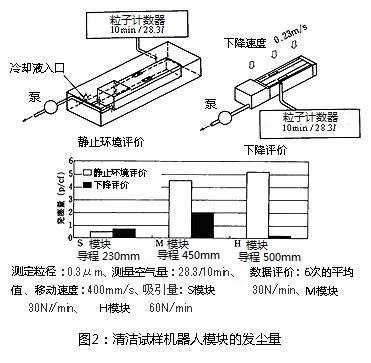
*) 清洁度基准粒子直径(评价的最小粒子直径)和其粒子浓度来表示,需要注意以前各国的基准未统一。现在由ISO统一了规格,JIS是以ISO为标准的(参照表1).其中ISO等级2~3是“1m³的空间中存在直径0.1μm以上的粒子100~1000个以下”的意思,相同的测定值由FED表示的话就记成等级1。( 根据FED.ST.209D,等级1 = 0.5μm粒子1个 /ft³ = 0.1μm 粒子35个/ft³= 0.1μm 粒子1000 个/m³(1ft³=0.0283m³)
(2) 低振动
末端作用部的晶片抓取部单是搭载晶片就有许多抓取方式。以下是吸着方式的缺点,伴随吸着/放开的发尘无法避免、卡盘的开关需要时间这些问题的解决和抓取方式固有的弱点不抗振动的缺点,需要通过驱动装置的进步来改善。
搬运手臂中的晶片的位置偏移会引起发尘以及晶片表面的划伤,因此决不能发生(一旦发生偏移在交接晶片会将偏移量这部分推回使得再次发生偏移)。抓取方式的晶片所受的抓取力仅与晶片表面的摩擦系数有关所以对振动非常敏感。一般要求振动加速度在0.1G 以下(rms),但这也包含了启动/停止时的加减速,抓取方法也是对动作节拍自身有界限的一种方式。
低流动评价方式通过捕捉局部发尘来大致测定发尘量,实际却产生了反效果,推测是由于样品位置的发尘已发生扩散。这种评价方式的缺点在于,测定结果会受发尘部位与样品管端的距离、方向影响,且在存在局部发尘处时容易产生较大误差。尽管从能判断发尘位置来看,它是一种有效方法,但将其用于驱动装置的性能评价时,必须充分注意设定条件。
静止环境评价因不存在上述问题,能够进行高可靠性的发尘量评价,因此后续评价均采用这种方式,它是NSK的评价方式。但需要注意的是,该评价的测量结果可能导致末端作用部的清洁度出现极大的发尘量(尤其是在低流动环境下,末端作用部的清洁度结果会完全不同)。
无论如何,都能看出直动驱动装置的清洁度非常优异。接下来将说明提高清洁度的构造。
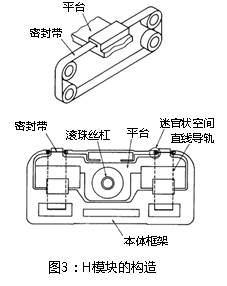
图3是3类的清洁式样机器人模块中,可搬运质量最大的“H模块”的横截面的示意图。通过左右各2个的直线导轨滑块,支撑上下、左右以及3个方向的力矩,由滚珠丝杠(由伺服电机驱动)来进行轴方向上的定位。并且,作为特殊构造设计有盖住滑动开口部的密封皮带。
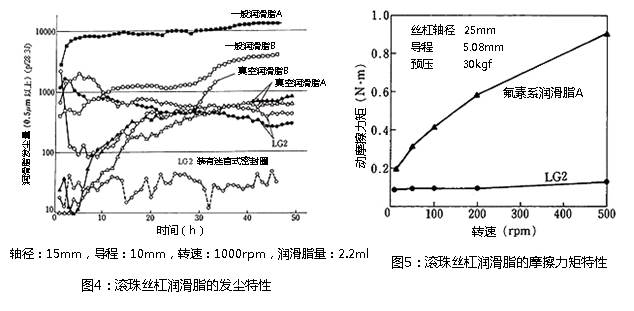
滚珠丝杠、直线导轨、轴承的润滑所使用的润滑脂是主要的发尘源。图4显示了滚珠丝杠涂布不同润滑脂时的发尘量。含氟系润滑脂广泛用于真空环境,因其粘度高、发尘量少,也可用于清洁环境。经过一段时间后的发尘量仅为一般润滑脂的1/10。
但与图2相比,其发尘量达到了20倍,这是由于吸引效果强大所致。此外,本测定是密闭空间下的发尘量,可认为与实际使用的开放空间相比,该数值更低。
LG2润滑脂是我公司研发的清洁用润滑脂,与含氟系润滑脂的发尘量相同。并且,滚珠丝杠螺母两端设计有迷宫密封圈,使发尘量减少至1/10。
LG2润滑脂的特点恰好弥补了含氟系润滑脂的缺点,在“润滑性能差”“动摩擦力矩大”“防锈能力差”这些方面,其性能已提升至与一般润滑脂同等水平。图5显示了其动摩擦特性。含氟系润滑脂因高基油粘度而具备低发尘特性,而LG2则是不依赖基油粘度的低发尘润滑脂。
此外,半导体・液晶(LCD)制造设备所使用的驱动装置,正朝着高温、大负载的应用领域扩展。
此时,发尘物质中含有的金属元素成为了一大问题。为应对这一问题,具备与LG2相同发尘特性、使用温度范围更广,且低发尘、耐高温、低金属元素含量的清洁润滑脂——LGU已被开发并投入使用。
这是通过真空泵、排气扇作用于发尘源以维持负压,使空气从外部向发尘源流入,从而提高清洁度的方法。其中包括对滚珠丝杠螺母部分、直线导轨滑块部分单独采用吸引的方法,以及对驱动装置整体采用吸引的方法。
前者的吸引处位于滑动侧,且因数量较多需要吸引气管缠绕的空间;此外,由于吸引处靠近润滑脂润滑部位,可能出现吸引口被润滑脂堵塞而丧失功能的情况,这些都是其存在的问题。后者为防止发尘,需要在本体的滑动开口部形成循环空气流,结果导致吸引量过大的缺点。
图3的驱动装置采用了后一种方法,但在开口部使用密封皮带覆盖。密封皮带两端由滑动平台固定,本体框架两端设有滑轮引导其回转,通过这种构造,密封皮带与本体框架的沟槽部分形成迷宫状空间,利用产生的高速气流,将吸引量降至60Nl/min(仅为无密封皮带时的1/5以下)。
直动驱动产品中,由本体框架包围的直动部分会产生类似活塞的作用,因此移动方向前方的内部压力会升高,当移动至行程末端时,存在排出灰尘的问题(活塞作用)。可通过以下方法减少这些影响:
(1)直动部分的横截面积小型化
直动部分由直线导轨滑块、滚珠丝杠螺母以及它们与工件相结合的滑动平台组成,必须保证末端作用部固定部的刚度。通过缩小上述部分的横截面积,图3产品的滑动平台末端作用部固定部分被配置在能获得最大刚度的直线导轨中央位置。
与旧产品相比,其旋转方向刚度提高至1.8倍,同时由于滑动平台的薄壁化,直动部分横截面积从77cm²减少至63cm²。但在400mm/s的移动速度下,这种活塞作用仍会以151Nl/min的速度排出灰尘,这也是直动驱动难以实现高清洁度的重要原因。
(2)本体框架两端的连通
移动平台移动方向后方的空间会因与前述相反的作用产生负压,因此将其与前方空间连通可减小前方空间的气压。多数驱动装置的本体框架采用挤压成形的铝材,其形状既能确保横截面的刚性,又通过多个中空部分实现轻量化。这些中空部分连通了滑动平台前后的移动空间,容易产生上述作用。
驱动装置d振动问题大致可分为2类,需要注意它们的解决方向完全相反。
清洁搬运手臂将来的需求将是“减低发尘量和减小可检出微粒的半径”以及“需求扩大的同时降低成本”。
随着半导体晶体的高集成化,同时进行着减低发尘量和减小可检出微粒的半径,就驱动部来说不久的将来会要求至0.05μm的粒子 35个/m³这种程度。在追求滚动引导型驱动装置的极致性能的同时,非接触式驱动、引导驱动方式所构成的搬运手臂在今后也可能迎来需求期。
另一方面,HDD的高密度化,LCD、PDP的普及所需要的组装・检查工程中对清洁搬运手臂的需求也在扩大,想必今后降低成本的需求也会越来越强烈。但是与一般的搬运手臂不同,清洁搬运手臂有低流动等设备方面的高价格,所以对于驱动装置的需求来说,相较于低成本化更需要能简易安装的高清洁度的产品。
无论如何期待清洁产品市场的扩大的同时,清洁搬运手臂技术与现今依赖于清洁空气供给的装置保持同一水准的清洁度,日益向有竞争力的性能水平的产品成熟发展。